Proof of concept "Cloud-based control of automated guided vehicles (AGV) and robots" finalized
Modern production facilities have to support on demand product customization to satisfy customer needs. One key technology to make this happen are Automated Guided Vehicles (AGVs). These are mobile transport robots, which distribute raw materials and parts on the factory shop floor and potentially among different manufacturing halls and warehouses. The navigation of the AGVs on the factory shop floor or in outdoor areas is a computationally complex task requiring significant computing resources. Cloud-based AGV navigation enables cooperation and centralized information exchange between multiple robots and AGVs.
As the number and variation of AGVs within a production facility site increases, so does the complexity of their control, for guaranteeing a seamless and orchestrated operation.

Figure 1
The development of the proof of concept "Cloud-based control of automated guided vehicles (AGV) and robots" was successfully finished in February 2024. The objective of this PoC was to showcase that AGVs and robots can be remotely controlled and orchestrated by software services that run on the cloud, where the cloud itself is connected to the industry shop over a Passive Optical Network (PON).
The PoC envisioned to implement a simple pick & place task with a marker-based localization of the robot arm on the AGV relative to a stationary object.
F5G Open Lab and the factory shop floor at Fraunhofer IPK are connected with around 3km of dark fiber as it is shown in figure 2 below.
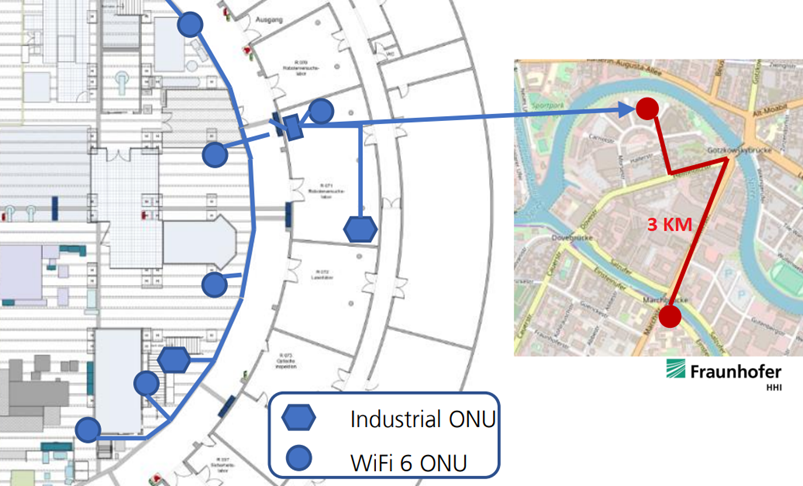
Figure 2: F5G OpenLab and Fraunhofer IPK connectivity map
The network architecture introduced previously in the following article, extended towards IPK and a video surveillance zone that is considered for the multi-service PON PoC. For this PoC, it was installed several WiFi ONUs (Optical Network Units) and two Industrial ONU at IPK. The central OLT (Optical Line Terminal) is located at Fraunhofer HHI, with the ONUs at IPK connected to a single XGS-PON port on the OLT. The OLT's uplink then connects to the cloud through an aggregation switch.
The network architecture of the current PoC is shown in figure 3 below.
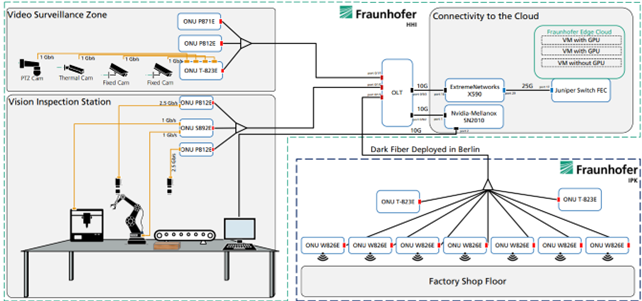
Figure 3: Network architecture of the PoC
In this PoC, a robotic arm, equipped with a camera, is mounted on an AGV. The software services run on the cloud that is connected to the shop floor via a PON. WiFi 6 ONUs support the roaming of clients.
First the robot should be turned on. Once the robot is operational, the orchestration of the PoC starts generating commands. First the navigation gets a request to compute a path to the material shelf. When the path is generated, a feedback loop is executed between the VM and the robot over the PON network, sending velocity commands to the robot and checking the position on the map in real time. Arrived at the material shelf, the orchestration requests the motion planning service to compute a trajectory for the robotic arm, so that the arm moves its eye-in-hand camera to a scanning position. Arrived in this arm pose, the machine detection service is called, which allows the full spatial detection of the material shelfs geometry through an attached ChArUco marker. With the shelf detected, a part is picked up from the storage surface of the AGV and subsequently inserted into the shelf. With the part inserted, the robot arm retracts out of the shelf.

Figure 4: AGV with robotic arm on it is performing a task
To demonstrate also the process of picking up pieces from a storage shelf, the aforementioned procedure is executed again, but when entering the shelf this time, the part is extracted from the holder in the shelf and placed on top of the storage surface of the AGV. Now the AGV is loaded with a part (blank part), which is to be loaded into a CNC milling machine. The robot first has to navigate and drive to the machine the same way as explained above. When arrived the machine’s marker is scanned to detect its exact position and geometry. Then the arm picks up the blank from the AGV’s storage surface and enters the machine. Inside of the machine is a fixture, into that the robot arm has to insert the part. When done, the arm is retracted from the CNC machine and finally reaches its idle state, which terminates the orchestration.
The area is scanned by the detectors located on the robot. The map and the trajectory are illustrated in figure 5 below.
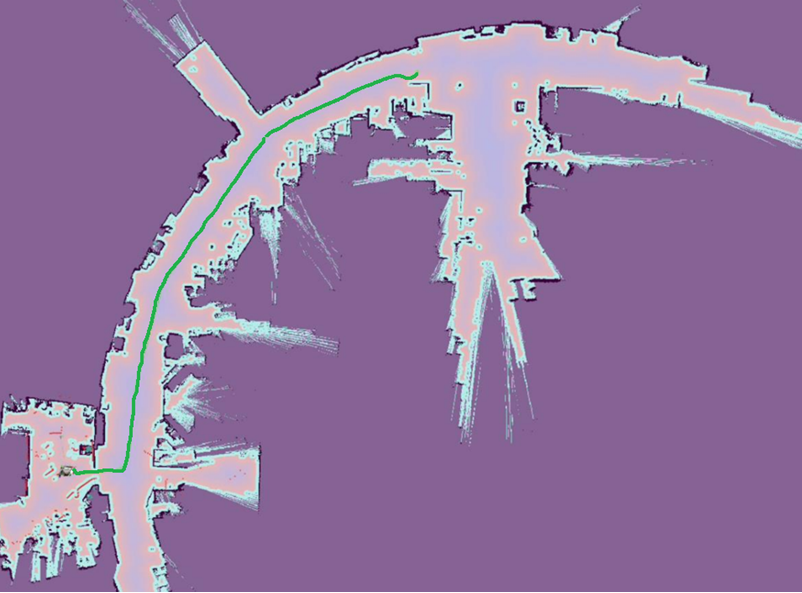
Figure 5: Map view of robot (bottom left) in shop floor, computed navigation path in green
Results
Results and analytics were mainly focused on the networking performance of the PoC. To analyse the networking behavior, it was used telemetry framework to record the data traffic between the factory shop floor and the cloud.
The testbed was specifically designed to cater to the stringent latency demands associated with the use case, leveraging network slicing to ensure the optimal performance. Only one slice was configured and it carried all the traffic associated with AGV control and visualization (shop floor map, sensor data).
A closed control loop to operate AGVs and robot in factory shop floors was built and demonstrated using software services running on the cloud. The broadband connectivity was provided by PON and had shown to be quite reliable for our use-case of interest.
The prototype has been tested and showcased in action to advertise the F5G OpenLab during several events and venues such as:
- Mobile World Congress (MWC) 2024 in Barcelona, Spain.
- Optical Fiber Communication Congress (OFC) 2024 in San Diego, USA.
- Hannover Messe 2024, Hannover, Germany.
One of the main outcomes of this activity was providing the F5G OpenLab testbed at Fraunhofer HHI premises dark fiber connectivity to the factory shop floor of Fraunhofer IPK that can be used and/or extended in forthcoming activities in the future.
To demonstrate this PoC, please play the video below:

Demonstration of the Cloud-based control of automated guided vehicles (AGV) and robots
Related article
ETSI Blog - Proof of Concept "Visual Inspection for automatic quality assessment"
